Um sensor no sentido geral é um dispositivo que converte uma quantidade física em outra, conveniente para processamento, transmissão ou conversão subsequente. Via de regra, a primeira grandeza é física, não passível de medição direta (temperatura, velocidade, deslocamento, etc.), e a segunda é um sinal elétrico ou óptico. Um nicho no campo de instrumentos de medição é ocupado por sensores, cujo principal elemento é um indutor.
Contente
Como o sensor de indutância funciona e como funciona
De acordo com o princípio de funcionamento, os sensores indutivos são ativos, ou seja, necessitam de um gerador externo para funcionar. Ele fornece um sinal com uma determinada frequência e amplitude ao indutor.
A corrente que passa pelas espiras da bobina cria um campo magnético. Se um objeto condutor entrar no campo magnético, os parâmetros da bobina mudam.Resta apenas corrigir essa alteração.
Sensores simples sem contato reagem ao aparecimento de objetos metálicos na zona próxima do enrolamento. Isso altera a impedância da bobina, essa alteração deve ser convertida em sinal elétrico, amplificar e (ou) fixar a passagem do limite usando um circuito de comparação.
Sensores de outro tipo respondem a mudanças na posição longitudinal do objeto que serve como núcleo da bobina. Quando a posição do objeto muda, ele se move para dentro ou para fora da bobina, alterando assim sua indutância. Essa mudança pode ser convertida em um sinal elétrico e medida. Outra versão de tal sensor é quando um objeto se aproxima da bobina do lado de fora. Isso faz com que a indutância diminua devido ao efeito do solo.
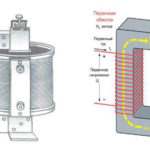
Outra versão do sensor de deslocamento indutivo é um transformador diferencial linearmente ajustável (LVDT). É uma bobina composta, feita na seguinte ordem:
- enrolamento secundário 1;
- Primeira frase;
- enrolamento secundário 2.
O sinal do gerador é alimentado ao enrolamento primário. O campo magnético criado pela bobina do meio induz um EMF em cada um dos secundários (princípio do transformador). O núcleo, ao se movimentar, altera a ligação mútua entre as bobinas, alterando a força eletromotriz em cada um dos enrolamentos. Esta mudança pode ser corrigida pelo circuito de medição. Uma vez que o comprimento do núcleo é menor que o comprimento total da bobina composta, a posição do objeto pode ser determinada inequivocamente pela razão EMF nos enrolamentos secundários.
No mesmo princípio - uma mudança no acoplamento indutivo entre os enrolamentos - um sensor de giro é construído.Consiste em duas bobinas coaxiais. O sinal é aplicado a um dos enrolamentos, o EMF no segundo depende do ângulo de rotação mútuo.
Do princípio de operação, é óbvio que os sensores indutivos, independentemente do design, são sem contato. Eles funcionam à distância e não requerem contato direto com o objeto controlado.
Vantagens e desvantagens dos sensores indutivos
As vantagens dos sensores do tipo indutivo incluem principalmente:
- confiabilidade do projeto;
- falta de conexões de contato;
- alta potência de saída, o que reduz a influência do ruído e simplifica o circuito de controle;
- alta sensibilidade;
- a capacidade de trabalhar a partir de fontes de tensão alternada de frequência industrial.
A principal desvantagem dos sensores do tipo indutivo é seu tamanho, peso e complexidade de fabricação. Para bobinas de enrolamento com os parâmetros fornecidos, é necessário equipamento especial. Além disso, a necessidade de manter com precisão a amplitude do sinal do oscilador mestre é considerada um sinal de menos. Quando muda, a área de sensibilidade também muda. Como os sensores operam apenas em corrente alternada, manter a amplitude torna-se um certo problema técnico. Diretamente (ou através de um transformador abaixador) não será possível conectar o sensor a uma rede doméstica ou industrial - nele, as flutuações de tensão em amplitude ou frequência podem chegar a 10% no modo normal, o que torna a precisão da medição inaceitável .
Além disso, a precisão da medição pode ser afetada por:
- campos magnéticos de terceiros (a blindagem do sensor é impossível com base no princípio de sua operação);
- captadores EMF de terceiros em cabos de alimentação e medição;
- erros de fabricação;
- erro característico do sensor;
- folgas ou deformações no local de instalação do sensor que não afetam o desempenho geral;
- dependência da precisão da temperatura (os parâmetros do fio do enrolamento mudam, incluindo sua resistência).
A incapacidade dos sensores de indutância de responder ao aparecimento de objetos dielétricos em seu campo magnético pode ser atribuída a vantagens e desvantagens. Por um lado, isso limita o escopo de sua aplicação. Por outro lado, torna-o insensível à presença de sujeira, graxa, areia, etc. nos objetos monitorados.
O conhecimento das deficiências e possíveis limitações na operação dos sensores indutivos permite o uso racional de suas vantagens.
Escopo dos sensores indutivos
Sensores de proximidade indutivos são frequentemente usados como interruptores de limite. Tais dispositivos se tornaram difundidos:
- em sistemas de segurança, como sensores para abertura não autorizada de janelas e portas;
- em sistemas de telemecânica, como sensores da posição final de unidades e mecanismos;
- na vida cotidiana nos esquemas para indicar a posição fechada de portas, persianas;
- para contar objetos (por exemplo, mover-se ao longo da correia transportadora);
- determinar a velocidade de rotação das engrenagens (cada dente, passando pelo sensor, cria um impulso);
- em outras situações.

Os encoders angulares podem ser usados para determinar os ângulos de rotação de eixos, engrenagens e outros componentes rotativos, bem como encoders absolutos. Além disso, tais dispositivos podem ser usados em máquinas-ferramentas e dispositivos robóticos juntamente com sensores de posição linear. Onde você precisa saber exatamente a posição dos nós dos mecanismos.
Exemplos práticos da implementação de sensores indutivos
Na prática, os projetos de sensores indutivos podem ser implementados de diferentes maneiras. A execução e inclusão mais simples é para um sensor único de dois fios, que monitora a presença de objetos metálicos em sua zona de sensibilidade. Esses dispositivos geralmente são feitos com base em um núcleo em forma de E, mas isso não é um ponto fundamental. Tal implementação é mais fácil de fabricar.
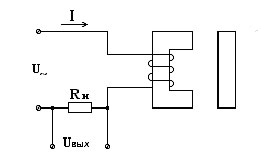
Quando a resistência da bobina muda, a corrente no circuito e a queda de tensão na carga mudam. Essas alterações podem ser confirmadas. O problema é que a resistência à carga se torna crítica. Se for muito grande, as mudanças na corrente quando um objeto de metal aparecer serão relativamente pequenas. Isso reduz a sensibilidade e a imunidade a ruídos do sistema. Se for pequeno, a corrente no circuito será grande, será necessário um sensor mais resistente.
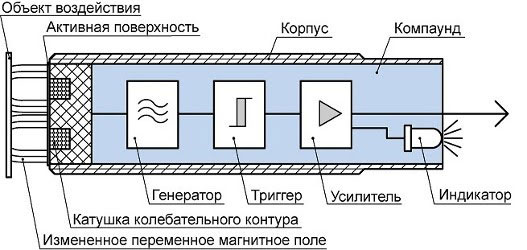
Portanto, existem projetos nos quais o circuito de medição é embutido na carcaça do sensor. O gerador gera pulsos que alimentam o indutor. Quando um determinado nível é atingido, o gatilho é acionado, passando do estado 0 para 1 ou vice-versa. O amplificador buffer amplifica o sinal em termos de potência e (ou) tensão, acende (apaga) o LED e emite um sinal discreto para o circuito externo.
O sinal de saída pode ser formado:
- por eletromagnetismo ou relé de estado sólido – zero ou um nível de tensão;
- "contato seco" relé eletromagnético;
- coletor aberto transistor (estruturas n-p-n ou p-n-p).
Neste caso, são necessários três fios para conectar o sensor:
- Comida;
- fio comum (0 volt);
- fio de sinal.
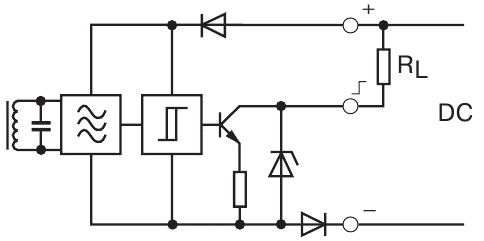
Esses sensores também podem ser alimentados por tensão CC. Pulsos à indutância são formados por meio de um gerador interno.
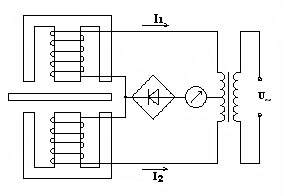
Encoders diferenciais são usados para monitoramento de posição. Se o objeto controlado é simétrico em relação a ambas as bobinas, a corrente através delas é a mesma. Quando algum enrolamento é deslocado em direção ao campo, ocorre um desequilíbrio, a corrente total deixa de ser igual a zero, o que pode ser registrado por um indicador com uma seta no meio da escala. O indicador pode ser usado para determinar tanto a magnitude da mudança quanto sua direção. Em vez de um dispositivo ponteiro, pode-se utilizar um esquema de controle que, ao receber informações sobre uma mudança de posição, emitirá um sinal, tomará medidas para alinhar o objeto, fará ajustes no processo tecnológico etc.

Os sensores feitos de acordo com o princípio dos transformadores diferenciais linearmente ajustáveis são produzidos na forma de estruturas completas, que são uma carcaça com enrolamentos primários e secundários e uma haste que se move no interior (pode ser acionada por mola). Os fios são trazidos para enviar um sinal do gerador e remover o EMF dos enrolamentos secundários. Um objeto controlado pode ser fixado mecanicamente à haste. Também pode ser feito de um dielétrico - apenas a posição da haste é importante para a medição.
Apesar de certas deficiências inerentes, o sensor indutivo fecha muitas áreas associadas à detecção sem contato de objetos no espaço.Apesar do constante desenvolvimento da tecnologia, esse tipo de dispositivo não sairá do mercado de dispositivos de medição em um futuro próximo, pois seu funcionamento é baseado nas leis fundamentais da física.
Artigos semelhantes: